PENGANTAR
METODE ELEKTORMAGNETIK
A. Pengertian Elektromagnetik
Secara
umum, metode geofisika dibagi menjadi dua kategori yaitu metode pasif dan
aktif. Metode pasif dilakukan dengan mengukur medan alami yang dipancarkan oleh
bumi. Metode aktif dilakukan dengan membuat medan gangguan kemudian mengukur
respons yang dilakukan oleh bumi. Sedangkan sumber-sumber yang digunakan dalam
pengukuran tersebut diantaranya ada- lah gelombang elektromagnetik, getaran,
sifat kelistrikan, sifat kemagnetan, dan lain-lain.
Metode
EM adalah salah satu metode geofisika untuk mengetahui anomali di bawah
permukaan yang memanfaatkan sifat medan magnet dan medan listrik (Buttler,
2010). Survei elektromagnetik (EM) pada dasarnya diterapkan untuk mengetahui
respons bawah permukaan menggunakan perambatan gelombang elektromagnetik yang
terbentuk akibat adanya arus bolak-balik dan medan magnetik. Medan
elektromagnetik primer dihasilkan oleh arus bolak-balik yang melewati sebuah
kumparan yang terdiri dari lilitan kawat. Respons bawah permukaan berupa medan
elektromagnetik sekunder dan resultan medan terdeteksi sebagai arus bolak-balik
yang menginduksi arus listrik pada koil penerima (receiver) sebagai
akibat adanya induksi elektromagnetik.
B. Jenis-jenis Metode Elektromagnetik
Metode
elektromagnetik yang digunakan umumnya terbagi menjadi 2, yaitu metode aktif
dan metode aktif. Metode elektromagnetik aktif, menggunakan sumber gelombang
elektromagnetik yang berasal dari alam, contoh dari metode
elektromagnetik ini antara lain Metode ektromagnetik VLF (Very Low Frequency)
dan Metode Elektromagnetik Magnetotelurik. Sedangkan metode elektromagnetik
aktif, menggunakan sumber gelombang elektromagnetik buatan yang di pancarkan
oleh transmitter.
1.
Metode Very Low
Frequency (VLF)
a.
Pengertian
Metode
VLF-EM merupakan salah satu metode geofisika yang digunakan untuk menggambarkan
rapat arus induksi yang terdapat di bawah permukaan bumi. Metode ini pertama
kali diperkenalkan oleh Ronka pada tahun 1971. Metoda ini memanfaatkan
gelombang elektromagnetik dengan frekwensi 5-30 kHz. Metode ini memanfaatkan
medan elektromagnetik yang dibangkitkan pemancar-pemancar gelombang radio VLF
berdaya besar yang dioperasikan untuk kepentingan militer, terutama untuk
berkomunikasi dengan kapal selam.
Medan
magnetik dan medan listrik yang dibangkitkannya disebut sebagai medan primer.
Medan primer membangkitkan medan sekunder sebagai akibat adanya arus induksi
yang mengalir pada benda-benda konduktor di dalam tanah. Medan sekunder yang
timbul bergantung pada sifat-sifat medan primer, sifat listrik benda-benda di
dalam tanah dan medium sekitarnya, serta bentuk dan posisi benda-benda
tersebut. Pada daerah pengamatan VLF dilakukan pengukuran terhadap resultan
medan primer dan medan sekunder, dimana perubahan resultan kedua medan tersebut
tergantung pada perubahanmedan sekunder. Sehingga bentuk, posisi, dan sifat
listrik benda-benda di bawah daerah pengamatan dapat diperkirakan. Metode VLF
ini secara umum digunakan untuk penelitian geologi yang bersifat dangkal.
Untuk
metode VLF ada dua mode yaitu mode tilt angle dengan parameter yang dipakai
adalah sudut tilt dan parameter resistivitas sedangkan mode resistivitas dengan
parameter tahanan jenis medium dan sudut fase medium. Komponen yang
diukur dalam VLF adalah tilt angle α yaitu sudut utama polarisasi ellip dari horizontal
(dalam derajat atau persen), dan eliptisitas Ɛ adalah perbandingan antara sumbu
kecil terhadap sumbu besarnya (dalam persen). Tilt angle α dan eliptisitas Ɛ,
berkaitan dengan komponen Ɛ mirip dengan bagian quadrature (komponen imaginer)
dari komponen vertikal. Kedua parameter tersebut diukur dalam prosentase
terhadap medan primer horizontal.
 |
| Gambar 1. Prinsip Kerja VLF |
b.
Peralatan
Peralatan yang digunakan
dalam pengambilan data metode VLF adalah sebagai berikut :
·
alat VLF-EM;
·
aki charger 12 V 2,2 A;
·
GPS;
·
kompas;
·
dan peralatan pendukung lainnya.
Peralatan utama yang diperlukan adalah alat untuk
menangkap sinyal VLF Elektromagnetik. Ada berbagai jenis alat untuk menangkap
sinyal VLF-EM ini. Jenis yang sering digunakan dalam akuisisi adalah VLF-EM
ENVI SCINTREX.
c.
Akuisi Data
Hal pertama yang harus
dilakukan untuk memperoleh data VLF adalah me- nyiapkan peralatan
dan menentukan lokasi penelitian yang akan diambil data VLF-nya. Setelah itu
proses akuisisi dilakukan sebagai berikut :
Data lapangan diambil
menggunakan T-VLF IRIS instrumen dan theodolit atau GPS untuk menentukan titik
ukur.
Sumber gelombang EM
frekuensi sangat rendah dari stasiun pemancar gelombang. Contohnya andalah VLF
NWC Australia, dimana stasiun ini memiliki daya pancar yang mencakup hampir
seluruh wilayah Indonesia.
Lintasan survei harus
memanjang dengan spasi untuk setiap stasiun. Lintasan yang dibuat diperkirakan
memotong daerah anomali. Arah pengukuran harus tegak lurus dengan
pemancar (Australia) atau menghadap kepemancar.
-
Pengambilan data VLF menggunakan alat
penangkap gelombang.
-
Akuisisi data dari masing-masing titik
pengukuran dilakukan dalam dua posisi, yaitu duduk dan berdiri.
d.
Pengolahan Data dan Interpretasi Data
1)
Pengolahan Data VLF
Data yang telah terambil meliputi data elektromagnetik yang didapatkan
dalam pengukuran. Data pengukuran tersebut merupakan superposisi antara sinyal
yang berasal dari anomali dan gangguan (noise) dari struktur lokal yang tidak
diharapkan. Terdapat empat jenis koreksi dalam pengolahan data VLF-EM, yaitu :
-
Koreksi Moving Average Filter
Dengan asumsi gelombang yang diterima oleh VLF-EM adalah frekuensi rendah
dan noise eksternal juga mempengaruhi pengukuran, maka filter moving average
digunakan untuk menghilangkan noise frekuensi tinggi. Oleh karena itu, sinyal
yang disaring benar- benar merupakan anomali bahan konduktif di bawah
permukaan.
-
Filter Flaser
Dengan menggunakan filter ini, titik potong dari anomali menjadi optimal
(mencapai puncaknya), maka hasil filter ini akan membuat proses analisis lebih
mudah. Filter Fraser diaplikasikan untuk setiap lintasan dengan menempatkan
lokasi pengukuran pada (x, y) dan anomali di (z), karena itu kontur dapat
dibuat. Kontur menunjukkan anomali tersebar di suatu daerah.
Interpretasi menggunakan data sebelum filter Fraser akan sulit, karena
kesulitan untuk menentukan titik perubahan yang tidak terfokus pada satu titik,
selain itu, jika daerah tersebut memiliki banyak bahan konduktif, titik
perubahan akan lebih sulit untuk ditentukan. Setelah dilakukan filter Fraser
anomali menjadi lebih jelas. Namun untuk mendapatkan hasil interpretasi yang
lebih baik dapat dibantu menggunakan data lain seperti (quadrature,
titlt-angle, atau total-field).
-
Filter Karous-Hjelt
Interpretasi kualitatif VLF-EM dapat dilakukan dengan menggunakan filter
Karous- Hjelt. Penerapan hasil filter ini berupa distribusi kerapatan arus yang
dapat member informasi mengenai daerah konduktif.
2)
Interpretasi Data VLF
Setelah dilakukan pengolahan data hingga dilakukan berbagai filter-filter
yang diperlukan makan hasil yang didapatkan berupa grafik frekuensi pengukuran
atau dalam bentuk kontur/citra 2D untuk dapat dilakukan interpretasi setelah
itu. Dalam melakukan interpretasi data VLF dapat dilakukan dengan beberapa cara
yaitu:
·
Interpretasi dari Derivatif Fraser
Interpretasi yang dilakukan dari hasil derivative koreksi Fraser Filter.
·
Interpretasi Perkiraan Langsung
Interpretasi yang dapat dlakukan dengan memperkirakan langsun dari hasil pengukuran
yang telah didapatkan. Interpretasi cara ini dapat dikatakan tidak akurat
karena masih banyak noise yang belum dikoreksi pada data yang telah
didapat.
·
Interpretasi dengan Filter Linier Karous
Hjelt
Interpretasi yang dilakukan dengan melihat hasil filter Linier
karous hjelt. Hasil yang didapatkan lebih baik dari sebelumnya karena telah
dilakukan beberapa kali pemfilteran.
·
Interpretasi terhadap data VLF dapat
dilakukan dengan perangkat lunak
Interpretasi yang dilakukan dengan perangkat lunak biasanya lebih mudah dan
lebih akurat.
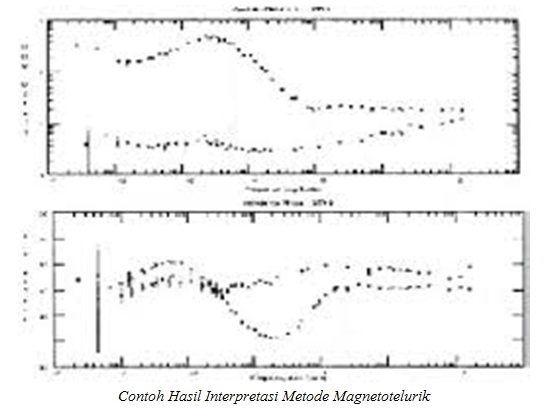
 |
| Gambar 2. Contoh Hasil Interpretasi Data VLF |
2.
Metode Magnetotelurik
a.
Pengertian
Metoda magnetotellurik (MT) merupakan salah satu metode eksplorasi
geofisika yang memanfaatkan medan elektromagnetik alam. Medan EM tersebut
ditimbulkan oleh berbagai proses fisik yang cukup kompleks sehingga spektrum
frekuensinya sangat lebar (10-5 Hz – 104Hz).
Kebergantungan fenomena
listrik-magnet terhadap sifat kelistrikan terutama konduktivitas medium (bumi)
dapat dimanfaatkan untuk keperluan eksplorasi menggunakan metoda MT. Hal ini
dilakukan dengan mengukur secara simultan variasi medan listrik (e) dan medan magnet
(H) sebagai fungsi waktu. Informasi mengenai konduktivitas medium yang terkandung
dalam data MT dapat diperoleh dari penyelesaian persamaan Maxwell menggunakan
model-model yang relatif sederhana.
Pada dekade 50-an untuk pertama
kali hal tersebut dilakukan dan dibahas secara terpisah oleh Tikhonov (1950),Rikitake
(1946), Price (1950), Kato dan Kikuchi (1950), Cagniard (1953) dan Wait (1954)
yang kemudian menjadi dasar metoda MT. Dengan demikian metoda ini masih relatif
baru jika dibandingkan dengan metoda geofisika lainnya.
Metode Magnetotellurik
adalah suatu metode yang bersifat pasif yang memanfaatkan tahanan jenis bawah
permukaan. Medan EM yang digunakan mempunyai frekuensi yang panjang sehingga
mampu menyelidiki keadaan permukaan dari kedalamaan puluhan hingga ribuan meter.
Sumber medan EM yaitu aktivitas petir (>1Hz), resonansi lapisan iomosfer
bumi (<1Hz), dan bintik hitam matahari (<<1Hz).
b.
Prinsip Kerja
Proses induksi
elektromagnetik yang terjadi pada anomaly permukaan bawah. medan EM yang
menembus bawah permukaan akan menginduksi anomaly konduktif bawah permukaan
bumi sehingga menghasilkan E dan magnetic sekunder yang kemudian direkam oleh
alat magnetotellurik. Kontras resistivitas antara atmosfer dan permukaan bumi
menunjukan bahwa gelombang EM merambat vertical ke bawah
permukaan. Berdasarkan sifat
penjalaran, kedalaman penetrasi bergantung pada frekuensi
dan resistivitas. Material yang resistivitas lebih kecil mempunyai
daya tembus yang lebih kecil sedangkan medan EM yang mempunyai frekuensi lebih
tinggi mempunyai daya tembus yang tinggi.
 |
| Gambar 3. Prinsip Kerja Magnetotelurik |
c.
Peralatan
Dalam penggunaan metode Magnetotellurik
(MT) sumber yang digunakan merupakan sumber alam. Sehingga pada metode ini
peralatan yang digunakan hanyalah alat penangkap gelombang elektromagnetik alat
tersebut. Peralatan tersebut diantaranya adalah sebagai berikut:
·
Alat Ukur AMT (Audio Magnetotelluric) atau Magnetometer
Alat ini untuk merekam komponen orthogonal
medan listrik (Ex dan Ey) dan medan magnetik (Hx dan Hy) pada jangkauan frekuensi
tertentu. Ada beberapa jenis alat ukur AMT yang sering digunakan,
diantaranya adala Model JCR-103 (4-Channel) dan Model MTU-5a (5-channel system)
produksi Phoenix Geophysics.
·
Koil Induksi Magnetik
Koil induksi magnetik berfungsi sebagai sensor medan magnetik. Sensor ini
dietakkan dipermukaan tanah.
·
Elektroda Listrik atau Porouspot
Elektroda listrik atau porouspot berfungsi
sebagai sensor medan listrik. Sensor ini ditancapkan dengan kedalaman sekitar
30 cm.
·
GPS
GPS digunakan untuk menentukan koordinat
lokasi pengambilan data.
·
Kabel-kabel
Kabel digunakan untuk menyambungkan
bagian-bagian alat dengan sensor.
·
Laptop atau komputer
Laptop atau Komputer untuk memonitor data
yang direkam alat ukur AMT.
d.
Akuisisi Data
Pada dasarnya
pengambilan data di daerah survey (data
acquisition) MT dilakukan untuk mengetahui variasi medan EM terhadap waktu,
yaitu dengan mengukur secara simultan komponen horisontal medan listrik (Ex ,
Ey) dan medan magnet (Hx , Hy). Sebagai pelengkap diukur pula komponen vertikal
medan magnet (Hz). Oleh karena itu, alat ukur MT terdiri dari tiga sensor
sinyal magnetik (magnetometer) dan dua pasang sensor sinyal listrik (elektroda)
beserta unit penerima yang berfungsi sebagai pengolah sinyal dan perekam data.
Setelah mempersiapkan
segala peralatan dan mengkalibrasi peralatan yang diperlukan, langkah-langkah
dalam pengambilan data yaitu sebagai berikut:
1)
Pemasangan Sensor Medan Listrik
Pemasangan sensor medan listrik yaitu dengan menanam 4 buah po-rouspot di
titik utara, selatan, barat dan timur dari titik pengukuran. Jarak antar tiap
porouspot dari timur ke barat dan dari utara ke selatan biasanya adalah 80-100
meter tergantung kepada kondisi topografi daerah setempat. Penanaman porouspot
dilakukan dengan menggali lubang sedalam kurang lebih 30 cm. Porouspot yang
digunakan sebagai sensor medan listrik ini sebaiknya dari jenis nonpolarizable
porouspot (Cu-CuSO4) dengan kestabilan yang tinggi
terutama ter-hadap perubahan temperatur karena pengukuran data MT memerlu-kan
waktu yang relatif lama dibanding dengan pengukuran potensial pada survey
geolistrik tahanan-jenis. Elektroda jenis Pb-PbCl2 atauCd-CdCl2
jarang digunakan, disamping mahal juga dapat mencemari lingkungan.
2)
Pemasangan Sensor Magnetik
Sensor medan magnetik berupa koil induksi magnetik ditanam pada kuadran
yang berbeda. Susunan letak sensor magnetik (Hx, Hy, Hz) pada masing-masing
kuadran ditunjukan oleh gambar 2.5. Koil induksi magnetik ini mempunyai panjang
120-150 cm.
Kuadran I terletak pada sumbu garis semu yang berarah timur dan
utara. Kuadran II terletak diantara arah barat dan selatan.
Kuadran III terletak diantara arah selatan dan timur. Pemasangan koil magnetik
harus dilakukan secara hati-hati, karena koil ini sensitif terhadap cuaca,
suhu, tekanan, dan benturan. Penanaman koil Hx umumnya ditanam pada kuadran II
dengan posisi horizontal dan bagian yang tersambung dengan kabel menghadap ke
selatan. Koil ini ditanam sedalam 30-50 cm, dan posisi
koil harus tepat horizontal dengan arah utara-selatan.
Hal yang sama dilakukan pada koil Hy dan Hz tetapi berbeda
kuadrannya. Koil Hy berada pada kuadran IV dengan bagian yang ter-sambung kabel
menghadap ke barat. Sedangkan untuk koil Hz sedikit berbeda dengan koil yang
lainnya, karena koil ini mngukur komponen vertikal. Koil Hz ditanam dengan
posisi vertikal pada kuadran I den-gan posisi bagian yang tersambung kabel
berada di permukaan.
3)
Pengaturan Konfigurasi Alat
Setelah instalasi alat selesai, seluruh kabel (sensor magnetik dan
sensor medan listrik) dan GPS disambungkan dengan magnetometer dan laptop.
Pengisian parameter data, konfigurasi sistem dan monitoring data selama
akuisisi dilakukan dengan menggunakan perangkat lunak yang mendukung,
misalnya MTU Host Software produk Phoenix Geophysics.
e.
Pengolahan Data
Data magnetotellurik
yang didapatkan dari akuisisi di lapangan adalah berupa seri waktu (time series). Adapun langkah-langkah
dalam pengolahan data magnetotellurik (MT) adalah sebagai berikut:
1)
Pra pengolahan Data
Pada tahap ini, data mentah yang telah direkam mengalami
proses editing dan demultiplexing untuk menggabungkan data
dari setiap kanal yang sama (elektrik atau magnetik) untuk masing-masing
jangkah frekuensi (LF, MF dan HF). Data tersebut
adalah keluaran dari sensor elektrik dan magnetik yang masih berupa harga
tegangan listrik terukur. Proses gain recovery ditujukan untuk
mengembalikanfaktor perbesaran atau amplifikasi yang telah digunakan. Disamping
itu, pada proses tersebut harga tegangan listrik terukur dikonversikan ke
dalam satuan yang biasa digunakan (mV/km
untuk medan lisrik dan nano Tesla atau gamma untuk medan magnet).
2)
Pengolahan Data
Seleksi data dalam domain waktu dapat dilakukan secara manual (seleksi
visual) maupun otomatis dengan menetapkan nilai minimal korelasi data yang
dapat diterima. Korelasi yang dimaksud adalah korelasi silang (cross-correlation) antara medan listrik
dan medan magnet yang saling tegak-lurus. Hasilnya dalam bentuk seri waktu (time series) disimpan dalam file.
3)
Analisa Tensor
Jika medium homogen atau berlapis horizontal (1-D) maka Zxx = Zyy = 0 dan
Zxy = -Zyx = Z, dimana Z adalah impedansi yang diperoleh dari komponen
horisontal medan listrik dan medan magnet yang saling tegak lurus. Dengan kata
lain, hubungan antara komponen horisontal medan listrik dan medan magnet tidak
lagi dinyatakan oleh suatu tensor melainkan suatu
bilangan skalar kompleks.Untuk medium 2-D dengan sumbu x atau sumbu y searah
dengan jurus (strike) maka Zxx = Zyy = 0, namun Zxy ≠ -Zyx. Secara matematis, kita
bisa menghitung tensor impedansi yang seolah-oleh diperoleh dengan sistem
koordinat pengukuran lain melalui rotasi. Hal ini sangat berguna karena arah
jurus struktur tidak diketahui saat pengukuran dilakukan. Jika sumbu x dalam
sistem koordimat pengukuran searah dengan jurus maka elemen tensor hasil rotasi
Zxy dan Zyx merupakan impedansi yang berkaitan dengan pengukuran
medan listrik sejajar jurus atau TE-mode (Transverse
Electric) dan tegak lurus jurus atau TM-mode (Transverse Magnetic).
f.
Pemodelan dan interpretasi Data
1)
Pemodelan 1D
Model 1-D merupakan model yang sederhana,
dalam hal ini tahanan jenis hanya bervariasi terhadap kedalaman. Parameter
dalam model 1-D adalah tahanan-jenis dan ketebalan tiap lapisan. Model 1-D
direpresentasikan oleh model berlapis horisontal, yaitu model yang terdiri dari
beberapa lapisan dimana tahanan-jenis pada setiap lapisannya ada-lah homogen.
Pemodelan menggunakan model 1-D hanya dapat diterapkan pada data yang memenuhi
kriteria data 1-D. Namun demikian, dengan
asumsi tertentu pemodelan 1-D dapat pula diterapkan pada data
yang dianggap mewakili kecenderungan lokal atau struktur secara garis besar,
misalnya impedansi invarian dan impedansi dari TE-mode. Pemodelan 1-D menggunakan
kurva sounding TE-mode didasarkan atas anggapan bahwa pengukuran medan listrik
searah jurus tidak terlalu dipengaruhi oleh diskontinuitas lateral tegak lurus.
2)
Pemodelan 2-D
Parameter model 2-D adalah nilai tahanan
jenis dari tiap blok yang berdimensi lateral (x) dan dimensi vertikal (z). Algoritma non-linier conjugate gradient
(NLCG) digunakan untuk memperoleh solusi yang meminimumkan fungsi objektif
ψ,Pemodelan inversi dengan algoritma NLCG yang dijelaskan oleh Rodi dan Mackie
(2001) diaplikasikan pada program WinGlink.
3)
Metode Inversi Bostick
Metoda inversi Bostick (Jones, 1983) merupakan cara yang cepat
dan mudah untuk memperkirakan variasi tahanan-jenis terhadap kedal-aman secara
langsung dari kurva sounding tahanan-jenis semu. Metode ini diturunkan dari
hubungan analitik antara tahanan jenis, frekuensi dan kedalaman investigasi
atau skin depth. Namun perlu diingat bahwa me-toda ini bersifat aproksimatif
sehingga hanya dapat dilakukan sebagai usaha pemodelan dan interpretasi pada
tahap pendahuluan. Dalam
me-toda inversi kuadrat terkecil (least-square),
model awal dimodifikasi secara iteratif hingga diperoleh model yang responsnya
cocok dengan data. Adanya aproksimasi atau linearisasi fungsi non-linier antara
data dan parameter model menyebabkan metode tersebut sangat sensitif terhadap
pemilihan model awal. Oleh karena itu model awal biasanya ditentukan dari hasil
pemodelan tak langsung atau hasil inversi Bostick. Kecenderungan terakhir
menunjukkan bahwa metode inversi tidak hanya ditujukan untuk menentukan satu
model saja melainkan sejumlah besar model yang memenuhi kriteria data (misalnya,
metode Monte-Carlo). Estimasi statistik dari model-model yang diperoleh
digunakan untuk menentukan solusi metoda inversi. Kecenderungan baru tersebut
terutama ditunjang dengan tersedianya komputer pribadi (PC) dan workstations yang
dilengkapi dengan processor berkecepatan tinggi.